The PDF for each lecture will be posted on this page during the semester.
We will be using Canvas to organize the course, for releasing the assignments, and for student submissions.
Canvas Link: https://canvas.its.virginia.edu/courses/147295
Course Github: https://github.com/linklab-uva/f1tenth-course-labs
In addition we will use Piazza (accessible via Canvas) for a Q/A forum.
If you are registered for the course, you will be automatically added to Canvas and Piazza.

L01: Course Introduction

L04: rospy API: Publishing, Subscribing, and Messages

L07: Wall Following Using PID Control

L10: Follow The Gap Algorithm

L13: ROS Cartographer SLAM

L16: ROS2
Lectures

L02: Introduction to Robot Operating System [ROS]

L05: ROS Services, Launch files, Parameters, and Bags

L08: Guest Lecture from NI - ADAS, HIL, and AV testing

L11: Scan Matching
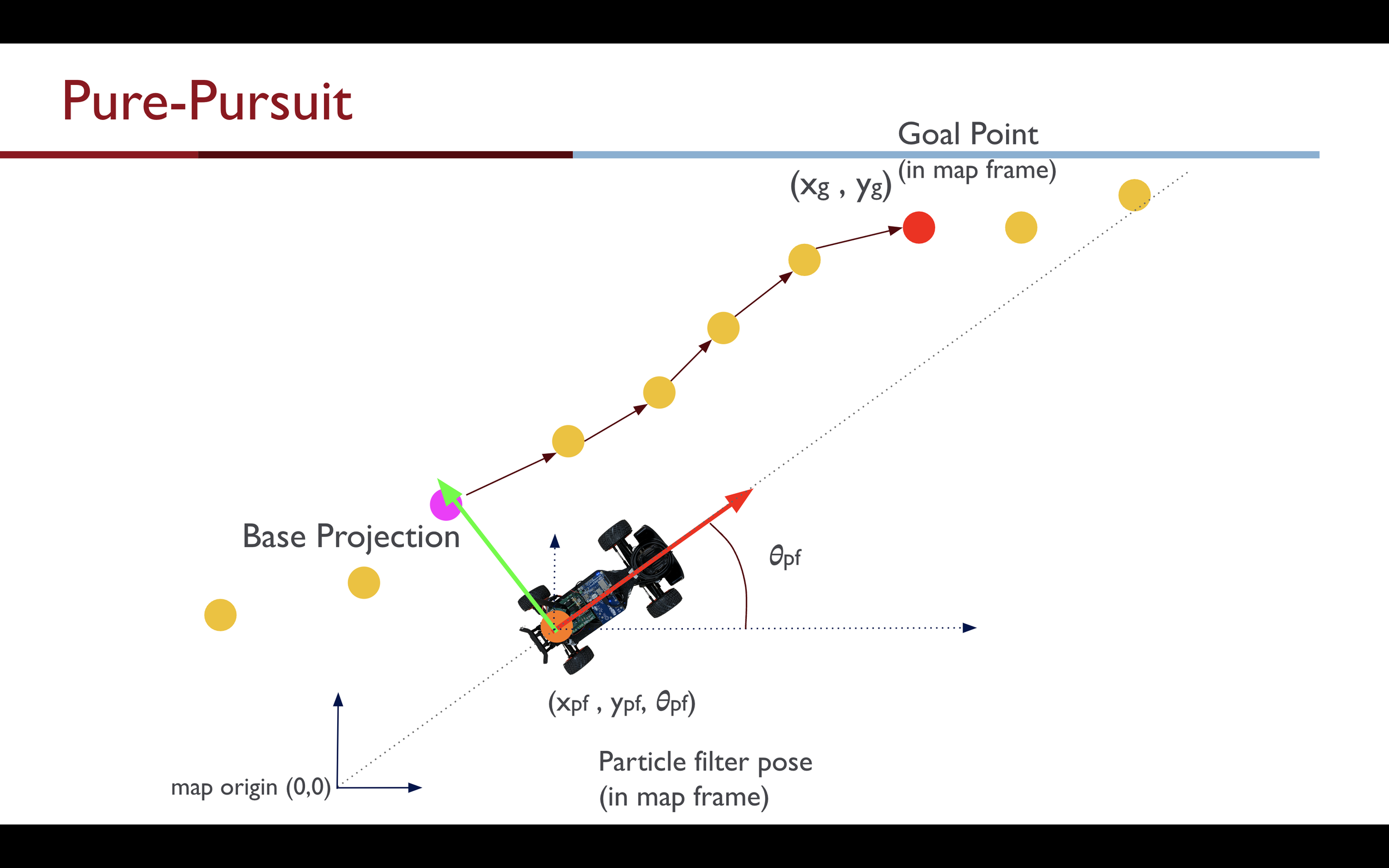
L14: Pure Pursuit Trajectory Following

L03: ROS Filesystem and Catkin Build System

L06: Know Your Racecar

L09: ROS Transformations and Coordinate Frames

L12: 2DOccupancy grids, Hector SLAM, ROS Cartographer
